Matemaatilise pendli mehaanilise koguenergia valem. Vibratsioonilise liikumise energia
Kui vedru külge kinnitatud keha (joonis 4) paindub tasakaaluasendist kauguse A võrra näiteks vasakule, siis tasakaaluasendi läbinuna kaldub see paremale. See tuleneb energia jäävuse seadusest.
Kokkusurutud või venitatud vedru potentsiaalne energia on võrdne
kus k on vedru jäikus ja x on selle pikenemine. Kõige vasakpoolsemas asendis on vedru pikenemine x = - A, seega on potentsiaalne energia võrdne
Kineetiline energia on sel hetkel null, sest kiirus on null. See tähendab, et potentsiaalne energia on kogu süsteemi mehaaniline energia sel hetkel. Kui lepime kokku, et hõõrdejõud on null ja teised jõud on tasakaalus, siis võib meie süsteemi lugeda suletuks ja selle koguenergia ei saa liikumise ajal muutuda. Kui keha on liikumise ajal äärmises parempoolses asendis (x = A), on selle kineetiline energia on jälle võrdne nulliga ja koguenergia on jälle võrdne potentsiaaliga. Kuid koguenergia ei saa muutuda. Nii et see on jälle võrdne
See tähendab, et keha kaldub A-ga võrdse vahemaa võrra paremale.
Vastupidi, tasakaaluasendis on potentsiaalne energia null, kuna vedru ei deformeeru, x = 0. Selles asendis on keha koguenergia võrdne selle kineetilise energiaga
kus m on keha mass ja selle kiirus (see on hetkel maksimaalne). Kuid ka sellel kineetilisel energial peab olema võrdne väärtus. Järelikult muundatakse võnkeliikumise käigus kineetiline energia potentsiaalseks energiaks ja vastupidi. Mis tahes punktis tasakaaluasendi ja maksimaalse hälbe vahel on kehal nii kineetiline kui potentsiaalne energia, kuid nende summa, s.o. Kogu energia keha mis tahes asendis on võrdne. Võnkuva keha mehaaniline koguenergia W on võrdeline amplituudi ja selle võnkumiste ruuduga
Pendlid. Matemaatika pendel
Pendel on mis tahes keha, mis on riputatud nii, et selle raskuskese on riputuspunktist allpool. See tähendab, et nöörile riputatud koorem on pendliga sarnane võnkesüsteem seinakell. Iga süsteem, mis on võimeline toimima vabad vibratsioonid, on stabiilne tasakaaluasend. Pendli puhul on see asend, kus raskuskese asub vertikaalselt vedrustuspunktist allpool. Kui võtame pendli sellest asendist välja või lükkame seda, siis hakkab see võnkuma, kaldudes tasakaaluasendist esmalt ühes või teises suunas kõrvale. Teame, et suurimat kõrvalekallet tasakaaluasendist, milleni pendel jõuab, nimetatakse võnkumiste amplituudiks. Amplituud määratakse esialgse läbipainde või tõuke järgi, millega pendel pandi liikuma. See omadus – amplituudi sõltuvus tingimustest liikumise alguses – on iseloomulik mitte ainult pendli vabavõnkumisele, vaid üldiselt paljude võnkesüsteemide vabavõnkumisele.
Füüsikalise pendli võnkeperiood sõltub paljudest asjaoludest: keha suurusest ja kujust, raskuskeskme ja vedrustuspunkti vahelisest kaugusest ning kehamassi jaotusest selle punkti suhtes; Seetõttu on rippuva keha perioodi arvutamine üsna keeruline ülesanne. Asjad on lihtsamad matemaatiline pendel. Matemaatiline pendel on õhukese niidi külge riputatud raskus, mille mõõtmed on palju väiksemad kui keerme pikkus ja mille mass on palju suurem kui niidi mass. See tähendab, et kere (koormus) ja niit peavad olema sellised, et koormust saaks pidada materiaalseks punktiks ja niiti kaalutuks. Selliste pendlite vaatluste põhjal saab kindlaks teha järgmised lihtsad seadused.
1. Kui riputate pendli sama pikkusega (kaugus vedrustuspunktist koorma raskuskeskmeni) hoides üles erinevaid koormaid, on võnkeperiood sama, kuigi pendli massid koormused on väga erinevad. Matemaatilise pendli periood ei sõltu koormuse massist.
2. Trajektoori mis tahes punktis kehale mõjuv jõud on suunatud tasakaaluasendi poole ja tasakaalupunktis ise on võrdne nulliga.
3. Jõud on võrdeline keha kõrvalekaldega tasakaaluasendist.

Riis. 5.
4. Kui pendli käivitamisel painutame seda erinevate (kuid mitte liiga suurte) nurkade all, siis see võngub sama perioodiga, kuigi erineva amplituudiga. Kuni amplituudid ei ole liiga suured, on võnked oma kujult üsna lähedased harmoonilisele ning matemaatilise pendli periood ei sõltu võnkumiste amplituudist. Seda omadust nimetatakse isokronismiks (kreeka sõnadest "isos" - võrdne, "chronos" - aeg).
Selle asjaolu tuvastas esmakordselt 1655. aastal Galileo, väidetavalt järgmistel asjaoludel. Galileo jälgis lühtri õõtsumist Pisa katedraalis (s õigeusu kirik keskne lühter, paljude küünalde või lampidega lamp) pikal ketil, mis süttimisel lükatakse. Talituse ajal kiiged hääbusid järk-järgult (8. peatükk), see tähendab, et kiikede amplituud vähenes, kuid periood jäi samaks. Galileo kasutas aja indikaatorina enda pulssi.
See pendli omadus osutus mitte ainult üllatavaks, vaid ka kasulikuks. Galileo tegi ettepaneku kasutada kellas regulaatorina pendlit. Galileo ajal juhiti kellasid raskusega ja kiiruse reguleerimiseks kasutati sellist töötlemata seadet nagu tuuleveski labad, mis kasutasid õhutakistust. Võrdsete ajavahemike lugemiseks võiks kasutada pendlit, kuna väikesed võnked tekivad samaaegselt suurtega, mida põhjustavad juhuslikud tuuleiilid. Sajand pärast Galileod tulid kasutusele pendelkellad, kuid meremehi oli ikka vaja täpne kell pikkuskraadi mõõtmiseks merel. Auhind kuulutati välja merekella loomise eest, mis võimaldaks piisava täpsusega aega mõõta. Garisson sai auhinna kronomeetri eest, milles liikumise reguleerimiseks kasutati hooratast (balanssi) ja spetsiaalset vedru.
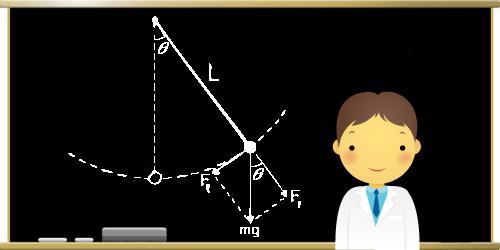
Tuletagem nüüd matemaatilise pendli võnkeperioodi valem.
Pendli kõikumisel liigub koorem kiirendatult mööda kaaret BA (joon. 5, a) tagasivoolujõu P 1 mõjul, mis liikumise ajal muutub.
Keha liikumise arvutamine muutuva jõu mõjul on üsna keeruline. Seetõttu toimime asjade lihtsustamiseks järgmiselt.
Paneme pendli mitte ühes tasapinnas võnkuma, vaid kirjeldame koonust nii, et koormus liigub ringikujuliselt (joon. 5, b). Selle liikumise saab saavutada kahe sõltumatu vibratsiooni lisamise tulemusena: üks - ikka veel joonise tasapinnas ja teine - risti. Ilmselgelt on mõlema tasapinnalise võnkumise perioodid samad, kuna ükski võnketasand ei erine teistest. Järelikult on keerulise liikumise periood - pendli pöörlemine piki koonust - sama, mis ühes tasapinnas pöörlemise periood. Seda järeldust saab hõlpsasti illustreerida otsese kogemusega, võttes kaks identset pendlit ja andes ühele neist tasapinnalise löögi ja teisele pöörlemise mööda koonust.
Kuid “koonilise” pendli pöördeperiood võrdub koormuse poolt kirjeldatud ringi pikkusega, jagatud kiirusega:
Kui vertikaalist kõrvalekaldumise nurk on väike (väikesed amplituudid!), siis võime eeldada, et tagasipöördumisjõud P 1 on suunatud piki ringi BC raadiust, st võrdub tsentripetaaljõuga:
Teisest küljest järeldub kolmnurkade OBC ja DBE sarnasusest, et BE: BD = CB: OB. Kuna OB=l, CB=r, BE=P 1, siis siit
Võrdledes mõlemad avaldised P 1 üksteisega, saame ringluskiiruse jaoks
Lõpuks, asendades selle perioodi T avaldisega, leiame
Seega sõltub matemaatilise pendli periood ainult raskuskiirendusest g ja pendli pikkusest l, st kaugusest vedrustuspunktist koormuse raskuskeskmeni. Saadud valemist järeldub, et pendli periood ei sõltu selle massist ja amplituudist (eeldusel, et see on piisavalt väike). Teisisõnu, põhiseadused, mis olid varem kindlaks tehtud vaatlustest, saadi arvutamise teel.
Kuid see teoreetiline järeldus annab meile rohkem: see võimaldab meil luua kvantitatiivse seose pendli perioodi, selle pikkuse ja raskuskiirenduse vahel. Matemaatilise pendli periood on võrdeline pendli pikkuse ja raskuskiirenduse suhte ruutjuurega. Proportsionaalsuskoefitsient on 2?.
Pendli perioodi sõltuvus vabalangemise kiirendusest põhineb väga suurel määral täpne viis selle kiirenduse määramine. Olles mõõtnud pendli pikkuse l ja määranud alates suur number võnkeperioodi T, saame arvutada saadud valemi g abil. Seda meetodit praktikas laialdaselt ei kasutata.
pendli võnkumise resonantskoordinaat
Matemaatiliseks pendliks (teine nimi on ostsillaator) nimetatakse mehaanilist süsteemi, mis koosneb materiaalsest punktist (kehast), mis ripub venitamatul kaaluta niidil (selle mass on keha raskusega võrreldes tühine) ühtlases gravitatsiooniväljas. Seda seadet on ka teist tüüpi. Keerme asemel võib kasutada kaaluta varda. Matemaatiline pendel võib selgelt paljastada paljude huvitavate nähtuste olemuse. Kui vibratsiooni amplituud on väike, nimetatakse selle liikumist harmooniliseks.
Mehaanilise süsteemi ülevaade
Selle pendli võnkeperioodi valemi tuletas Hollandi teadlane Huygens (1629-1695). See I. Newtoni kaasaegne oli sellest väga huvitatud mehaaniline süsteem. Aastal 1656 lõi ta esimese pendlimehhanismiga kella. Nad mõõtsid aega nende aegade kohta erakordse täpsusega. Sellest leiutisest sai kõige olulisem etapp füüsiliste katsete ja praktiliste tegevuste arendamisel.
Kui pendel on tasakaaluasendis (rippub vertikaalselt), tasakaalustab see niidi pingutusjõuga. Lame pendel pikendamatul keermel on kahe vabadusastmega süsteem koos siduriga. Kui muudate ainult ühte komponenti, muutuvad kõigi selle osade omadused. Seega, kui niit asendatakse vardaga, on sellel mehaanilisel süsteemil ainult 1 vabadusaste. Millised omadused on matemaatilisel pendlil? Selles kõige lihtsam süsteem Kaos tekib perioodiliste häirete mõjul. Juhul, kui vedrustuspunkt ei liigu, vaid võngub, on pendlil uus tasakaaluasend. Kiirete üles-alla võnkumiste korral omandab see mehaaniline süsteem stabiilse "tagurpidi" asendi. Sellel on ka oma nimi. Seda nimetatakse Kapitza pendliks.
Pendli omadused

Matemaatilisel pendlil on väga huvitavad omadused. Neid kõiki kinnitavad teadaolevad füüsikaseadused. Mis tahes muu pendli võnkeperiood sõltub erinevatest asjaoludest, nagu keha suurus ja kuju, vedrustuspunkti ja raskuskeskme vaheline kaugus ning massi jaotus selle punkti suhtes. Seetõttu on keha rippumisperioodi määramine üsna keeruline ülesanne. Palju lihtsam on arvutada matemaatilise pendli perioodi, mille valem on toodud allpool. Sarnaste mehaaniliste süsteemide vaatluste tulemusena saab kindlaks teha järgmised mustrid:
Kui pendli sama pikkuse säilitamisel riputame erinevad raskused, siis on nende võnkeperiood sama, kuigi nende massid on väga erinevad. Järelikult ei sõltu sellise pendli periood koormuse massist.
Kui süsteemi käivitamisel painutatakse pendel mitte liiga suure, vaid erinevate nurkade all, siis hakkab see võnkuma sama perioodiga, kuid erineva amplituudiga. Kuni kõrvalekalded tasakaalukeskmest ei ole liiga suured, on võnked nende kujul harmoonilistele üsna lähedased. Sellise pendli periood ei sõltu kuidagi võnkeamplituudist. Seda antud mehaanilise süsteemi omadust nimetatakse isokronismiks (tõlkes kreeka keelest "chronos" - aeg, "isos" - võrdne).
Matemaatilise pendli periood
See näitaja tähistab perioodi Hoolimata keerulisest sõnastusest on protsess ise väga lihtne. Kui matemaatilise pendli keerme pikkus on L ja vabalangemise kiirendus on g, siis on see väärtus võrdne:
Väikeste omavõnkumiste periood ei sõltu kuidagi pendli massist ja võnkumiste amplituudist. Sel juhul liigub pendel etteantud pikkusega matemaatilisena.
Matemaatilise pendli võnkumised

Matemaatiline pendel võngub, mida saab kirjeldada lihtsa diferentsiaalvõrrandiga:
x + ω2 sin x = 0,
kus x (t) on tundmatu funktsioon (see on radiaanides väljendatud kõrvalekalde nurk alumisest tasakaaluasendist hetkel t); ω on positiivne konstant, mis määratakse pendli parameetrite järgi (ω = √g/L, kus g on raskuskiirendus ja L on matemaatilise pendli (vedrustuse) pikkus.
Väikeste vibratsioonide võrrand tasakaaluasendi lähedal (harmooniline võrrand) näeb välja järgmine:
x + ω2 sin x = 0
Pendli võnkuvad liigutused
Matemaatiline pendel, mis teeb väikseid võnkumisi, liigub mööda sinusoidi. Teist järku diferentsiaalvõrrand vastab kõigile sellise liikumise nõuetele ja parameetritele. Trajektoori määramiseks on vaja määrata kiirus ja koordinaat, millest seejärel määratakse sõltumatud konstandid:
x = A patt (θ 0 + ωt),
kus θ 0 on algfaas, A on võnkeamplituud, ω on liikumisvõrrandist määratud tsükliline sagedus.
Matemaatiline pendel (suurte amplituudide valemid)
See mehaaniline süsteem, mis võngub märkimisväärse amplituudiga, allub keerukamatele liikumisseadustele. Sellise pendli jaoks arvutatakse need järgmise valemi järgi:
sin x/2 = u * sn(ωt/u),
kus sn on Jacobi siinus, mis u jaoks< 1 является периодической функцией, а при малых u он совпадает с простым тригонометрическим синусом. Значение u определяют следующим выражением:
u = (ε + ω2)/2ω2,
kus ε = E/mL2 (mL2 on pendli energia).
Mittelineaarse pendli võnkeperiood määratakse järgmise valemi abil:
kus Ω = π/2 * ω/2K(u), K on elliptiline integraal, π - 3,14.

Pendli liikumine mööda separatrit
Separatriks on dünaamilise süsteemi trajektoor, millel on kahemõõtmeline faasiruum. Matemaatiline pendel liigub mööda seda mitteperioodiliselt. Lõpmatult kaugel ajahetkel kukub see oma kõrgeimast asendist nullkiirusega küljele, seejärel saavutab selle järk-järgult. Lõpuks see peatub, naases algasendisse.
Kui pendli võnkumiste amplituud läheneb arvule π , see näitab, et liikumine faasitasandil läheneb separatrixile. Sellisel juhul käitub mehaaniline süsteem väikese perioodilise ajava jõu mõjul kaootiliselt.
Kui matemaatiline pendel kaldub tasakaaluasendist kõrvale teatud nurga φ võrra, tekib tangentsiaalne raskusjõud Fτ = -mg sin φ. Miinusmärk tähendab, et see tangentsiaalne komponent on suunatud pendli läbipainde vastassuunas. Kui tähistada x-ga pendli nihet mööda ringkaare raadiusega L, on selle nurknihe võrdne φ = x/L. Teine seadus, mis on mõeldud projektsioonidele ja jõule, annab soovitud väärtuse:
mg τ = Fτ = -mg sin x/L
Selle seose põhjal on selge, et see pendel on mittelineaarne süsteem, kuna jõud, mis kipub seda tasakaaluasendisse tagasi viima, on alati võrdeline mitte nihkega x, vaid patuga x/L.
Ainult siis, kui matemaatiline pendel sooritab väikseid võnkumisi, on see harmooniline ostsillaator. Teisisõnu, sellest saab mehaaniline süsteem, mis on võimeline teostama harmoonilisi võnkumisi. See lähenemine kehtib praktiliselt 15-20° nurkade puhul. Suure amplituudiga pendli võnked ei ole harmoonilised.
Newtoni seadus pendli väikeste võnkumiste kohta

Kui antud mehaaniline süsteem teostab väikseid võnkumisi, näeb Newtoni 2. seadus välja järgmine:
mg τ = Fτ = -m* g/L* x.
Selle põhjal võime järeldada, et matemaatiline pendel on võrdeline selle nihkega miinusmärgiga. See on seisund, mille tõttu süsteem muutub harmooniliseks ostsillaatoriks. Nihke ja kiirenduse vahelise proportsionaalsuse koefitsiendi moodul on võrdne ringsageduse ruuduga:
ω02 = g/l; ω0 = √ g/L.
See valem peegeldab seda tüüpi pendli väikeste võnkumiste loomulikku sagedust. Selle põhjal
T = 2π/ ω0 = 2π√ g/L.
Arvutused energia jäävuse seaduse alusel
Pendli omadusi saab kirjeldada ka energia jäävuse seaduse abil. Tuleb arvestada, et pendel gravitatsiooniväljas on võrdne:
E = mg∆h = mgL(1 - cos α) = mgL2sin2 α/2
Kogusumma võrdub kineetilise või maksimaalse potentsiaaliga: Epmax = Ekmsx = E
Pärast energia jäävuse seaduse kirjutamist võtke võrrandi parema ja vasaku külje tuletis:
Kuna konstantsete suuruste tuletis võrdub 0, siis (Ep + Ek)" = 0. Summa tuletis võrdub tuletiste summaga:
Ep" = (mg/L*x2/2)" = mg/2L*2x*x" = mg/L*v + Ek" = (mv2/2) = m/2(v2)" = m/ 2* 2v*v" = mv* α,
seega:
Mg/L*xv + mva = v (mg/L*x + m α) = 0.
Viimase valemi põhjal leiame: α = - g/L*x.
Matemaatilise pendli praktiline rakendamine
Kiirendus varieerub sõltuvalt laiuskraadist, kuna maakoore tihedus ei ole kogu planeedil ühesugune. Seal, kus esineb suurema tihedusega kivimeid, on see veidi kõrgem. Geoloogiliseks uurimiseks kasutatakse sageli matemaatilise pendli kiirendust. Seda kasutatakse erinevate mineraalide otsimiseks. Lihtsalt pendli võnkumiste arvu loendades saate tuvastada kivisütt või maaki Maa sisikonnas. See on tingitud asjaolust, et selliste fossiilide tihedus ja mass on suurem kui nende all olevatel lahtistel kivimitel.

Matemaatilist pendlit kasutasid sellised silmapaistvad teadlased nagu Sokrates, Aristoteles, Platon, Plutarchos, Archimedes. Paljud neist uskusid, et see mehaaniline süsteem võib mõjutada inimese saatust ja elu. Archimedes kasutas oma arvutustes matemaatilist pendlit. Tänapäeval kasutavad paljud okultistid ja selgeltnägijad seda mehaanilist süsteemi oma ennustuste täitmiseks või kadunud inimeste otsimiseks.
Ka kuulus prantsuse astronoom ja loodusteadlane K. Flammarion kasutas oma uurimistöös matemaatilist pendlit. Ta väitis, et selle abil suutis ta avastust ennustada uus planeet, Tunguska meteoriidi ilmumine ja teised tähtsaid sündmusi. Teise maailmasõja ajal tegutses Saksamaal (Berliinis) spetsialiseerunud Pendliinstituut. Tänapäeval tegeleb samalaadse uurimistööga Müncheni parapsühholoogia instituut. Selle asutuse töötajad nimetavad oma tööd pendliga "radiesteesiaks".
Matemaatika pendel on materiaalne punkt, mis ripub kaalutu ja venimatu niidiga, mis asub Maa gravitatsiooniväljas. Matemaatiline pendel on idealiseeritud mudel, mis kirjeldab reaalset pendlit õigesti ainult teatud tingimustel. Tõelist pendlit võib pidada matemaatiliseks, kui niidi pikkus on palju suurem kui sellele riputatud keha suurus, niidi mass on keha massiga võrreldes tühine ja niidi deformatsioonid on nii väikesed. et need võib üldse tähelepanuta jätta.
Võnkesüsteemi moodustavad sel juhul niit, selle külge kinnitatud keha ja Maa, ilma milleta see süsteem ei saaks pendlina toimida.
Kus A X – kiirendus, g - raskuskiirendus, X- nihe, l– pendli keerme pikkus.
Seda võrrandit nimetatakse matemaatilise pendli vabavõnkumiste võrrand. See kirjeldab kõnealust vibratsiooni õigesti ainult siis, kui on täidetud järgmised eeldused:
2) arvestatakse ainult väikese pöördenurgaga pendli väikseid võnkeid.
Mis tahes süsteemide vaba vibratsiooni kirjeldatakse kõigil juhtudel sarnaste võrranditega.
Matemaatilise pendli vabavõnkumiste põhjused on järgmised:
1. Pinge ja gravitatsiooni mõju pendlile, mis takistab selle liikumist tasakaaluasendist ja sunnib seda uuesti kukkuma.
2. Pendli inerts, mille tõttu ta oma kiirust säilitades ei peatu tasakaaluasendis, vaid läbib seda edasi.
Matemaatilise pendli vabavõnkumiste periood
Matemaatilise pendli vabavõnke periood ei sõltu selle massist, vaid selle määrab ainult keerme pikkus ja raskuskiirendus pendli asukohas.
Energia muundamine harmooniliste võnkumiste ajal
Vedrupendli harmooniliste võnkumiste käigus muudetakse elastselt deformeerunud keha potentsiaalne energia selle kineetiliseks energiaks, kus k – elastsuse koefitsient, X - pendli nihkemoodul tasakaaluasendist, m- pendli mass, v- selle kiirus. Vastavalt harmoonilise vibratsiooni võrrandile:
![]() ,
,
![]() .
.
Koguenergia vedru pendel:
![]() .
.
Matemaatilise pendli koguenergia:
![]()
Matemaatilise pendli puhul
Energiamuutused vedrupendli võnkumisel toimuvad kooskõlas jäävusseadusega mehaaniline energia (![]() ). Kui pendel liigub tasakaaluasendist alla või üles, suureneb selle potentsiaalne energia ja väheneb kineetiline energia. Kui pendel läbib tasakaaluasendi ( X= 0), selle potentsiaalne energia on null ja pendli kineetilisel energial on suurim väärtus, mis on võrdne koguenergiaga.
). Kui pendel liigub tasakaaluasendist alla või üles, suureneb selle potentsiaalne energia ja väheneb kineetiline energia. Kui pendel läbib tasakaaluasendi ( X= 0), selle potentsiaalne energia on null ja pendli kineetilisel energial on suurim väärtus, mis on võrdne koguenergiaga.
Seega pendli potentsiaalne energia muutub pendli vabavõnkumise käigus kineetiliseks, kineetiline potentsiaalseks, potentsiaal seejärel tagasi kineetiliseks jne. Kogu mehaaniline energia jääb aga muutumatuks.
Sunnitud vibratsioonid. Resonants.
Välise perioodilise jõu mõjul toimuvaid võnkumisi nimetatakse sunnitud võnkumised. Väline perioodiline jõud, mida nimetatakse liikumapanevaks jõuks, annab võnkesüsteemile lisaenergiat, mis läheb hõõrdumise tõttu tekkivate energiakadude täiendamiseks. Kui liikumapanev jõud muutub ajas vastavalt siinuse või koosinuse seadusele, siis on sundvõnkumised harmoonilised ja summutamata.
Erinevalt vabavõnkumisest, kui süsteem saab energiat ainult üks kord (kui süsteem viiakse tasakaalust välja), siis sundvõnkumiste korral neelab süsteem seda energiat välise perioodilise jõu allikast pidevalt. See energia korvab hõõrdumise ületamiseks kulutatud kaod ja seetõttu jääb võnkesüsteemi koguenergia endiselt muutumatuks.
Sundvõnkumiste sagedus on võrdne edasiviiva jõu sagedusega. Juhul, kui liikumapanev jõud sagedus υ langeb kokku võnkesüsteemi omasagedusega υ 0 , sundvõnkumiste amplituud on järsult suurenenud - resonants. Resonants tekib tänu sellele, et millal υ = υ 0 vabade vibratsioonidega ajas mõjuv välisjõud on alati võnkuva keha kiirusega joondatud ja teeb positiivset tööd: võnkuva keha energia suureneb, võnkumiste amplituud muutub suureks. Sundvõnkumiste amplituudi graafik A T liikuva jõu sagedusel υ joonisel näidatud graafikut nimetatakse resonantskõveraks:

Resonantsi nähtus mängib olulist rolli paljudes loodus-, teadus- ja tööstusprotsessides. Näiteks tuleb sildade, hoonete ja muude koormuse all vibratsiooni tekitavate konstruktsioonide projekteerimisel arvestada resonantsi nähtusega, vastasel juhul võivad need konstruktsioonid teatud tingimustel hävida.
Tehnoloogias ja meid ümbritsevas maailmas peame sageli kokku puutuma perioodiline(või peaaegu perioodiline) protsessid, mis korduvad korrapäraste ajavahemike järel. Selliseid protsesse nimetatakse võnkuv.
Võnkumine on looduses ja tehnikas üks levinumaid protsesse. Putukate ja lindude tiivad lennus, kõrghooned ja kõrgepingejuhtmed tuule mõjul, keritud kella pendel ja auto vedrudel sõidu ajal, jõe tase aastaringselt ja vee temperatuur. inimese keha haiguse ajal, heli on õhu tiheduse ja rõhu kõikumine, raadiolained - elektri- ja magnetvälja tugevuste perioodilised muutused, nähtav valgus on ka elektromagnetilised vibratsioonid, ainult veidi erineva lainepikkuse ja sagedusega, maavärinad on pinnase vibratsioonid, pulss on inimese südamelihase perioodilised kokkutõmbed jne.
Võnkumised võivad olla mehaanilised, elektromagnetilised, keemilised, termodünaamilised ja mitmesugused muud. Vaatamata sellisele mitmekesisusele on neil kõigil palju ühist.
Erineva füüsikalise iseloomuga võnkumisnähtused alluvad üldistele seadustele. Näiteks voolu võnkumisi elektriahelas ja matemaatilise pendli võnkumisi saab kirjeldada samade võrranditega. Võnkumismustrite ühtsus võimaldab vaadelda erineva iseloomuga võnkeprotsesse ühest vaatenurgast. Võnkulise liikumise märk on selle perioodilisus.
Mehaaniline vibratsioon -Seeliigutused, mida korratakse täpselt või ligikaudu korrapäraste ajavahemike järel.
Lihtsate võnkesüsteemide näideteks on vedrule mõjuv koormus (vedrupendel) või pall nöörile (matemaatiline pendel).


Mehaaniliste vibratsioonide ajal muutuvad kineetilised ja potentsiaalsed energiad perioodiliselt.
Kell maksimaalne kõrvalekalle keha tasakaaluasendist, kiirusest ja seetõttu kineetiline energia läheb nulli. Selles asendis potentsiaalne energia võnkuv keha saavutab maksimaalse väärtuse. Vedrule mõjuva koormuse korral on potentsiaalne energia vedru elastse deformatsiooni energia. Matemaatilise pendli jaoks on see energia Maa gravitatsiooniväljas.
Kui keha oma liikumises läbib tasakaaluasend, selle kiirus on maksimaalne. Keha ületab tasakaaluasendi vastavalt inertsiseadusele. Praegusel hetkel on maksimaalne kineetiline ja minimaalne potentsiaalne energia. Kineetilise energia suurenemine toimub potentsiaalse energia vähenemise tõttu.
Edasise liikumisega hakkab potentsiaalne energia suurenema kineetilise energia vms vähenemise tõttu.
Seega toimub harmooniliste võnkumiste ajal kineetilise energia perioodiline muundumine potentsiaalseks energiaks ja vastupidi.
Kui võnkesüsteemis puudub hõõrdumine, jääb mehaaniline koguenergia mehaaniliste vibratsioonide ajal muutumatuks.
Kevadkoormuse jaoks:
![]()
Maksimaalse läbipainde asendis on pendli koguenergia võrdne deformeerunud vedru potentsiaalse energiaga:
Tasakaaluasendi läbimisel on koguenergia võrdne koormuse kineetilise energiaga:

Matemaatilise pendli väikeste võnkumiste jaoks:

Maksimaalse kõrvalekalde asendis on pendli koguenergia võrdne kõrgusele h tõstetud keha potentsiaalse energiaga:

Tasakaaluasendi läbimisel on koguenergia võrdne keha kineetilise energiaga:

Siin h m– pendli maksimaalne kõrgus Maa gravitatsiooniväljas, x m ja υ m = ω 0 x m- pendli tasakaaluasendist kõrvalekaldumise maksimumväärtused ja kiirus.
Harmoonilised võnkumised ja nende omadused. Harmoonilise vibratsiooni võrrand.
Kõige lihtsamad võnkeprotsesside tüübid on lihtsad harmoonilised vibratsioonid, mida kirjeldab võrrand
x = x m cos(ω t + φ 0).
Siin x– keha nihkumine tasakaaluasendist,
x m– võnkumiste amplituud, st maksimaalne nihe tasakaaluasendist,
ω – tsükliline või ringsagedus kõhklus,
t- aeg.
Võnkulise liikumise tunnused.
Nihe x – võnkepunkti kõrvalekalle tasakaaluasendist. Mõõtühikuks on 1 meeter.
Võnkumise amplituud A – võnkepunkti maksimaalne kõrvalekalle tasakaaluasendist. Mõõtühikuks on 1 meeter.
VõnkeperioodT– nimetatakse minimaalset ajavahemikku, mille jooksul toimub üks täielik võnkumine. Mõõtühik on 1 sekund.
T=t/N
kus t on võnkumiste aeg, N on selle aja jooksul sooritatud võnkumiste arv.
Harmooniliste võnkumiste graafikult saate määrata võnkumiste perioodi ja amplituudi:

Võnkesagedus ν – füüsikaline suurus, mis võrdub võnkumiste arvuga ajaühikus.
ν = N/t
Sagedus on võnkeperioodi pöördväärtus:
Sagedus võnkumised ν näitab, kui palju võnkumisi toimub 1 s Sageduse ühik on hertsi(Hz).
Tsükliline sagedus ω– võnkumiste arv 2π sekundis.
Võnkesagedus ν on seotud tsükliline sagedus ω ja võnkeperiood T suhted:
Faas harmooniline protsess - harmooniliste võnkumiste võrrandis siinuse või koosinusmärgi all olev suurus φ = ω t + φ 0 . Kell t= 0 φ = φ 0, seega φ 0 helistas algfaas.
Harmooniline graafik esindab siinus- või koosinuslainet.
Kõigil kolmel juhul sinise kõvera puhul φ 0 = 0:

ainult suurem amplituud(x" m > x m);

punane kõver erineb sinisest ainult tähenduses periood(T" = T/2);

punane kõver erineb sinisest ainult tähenduses algfaasis(rõõmus).
Kui keha võngub mööda sirgjoont (telg HÄRG) on kiirusvektor alati suunatud piki seda sirget. Keha liikumiskiiruse määrab väljend
![]()
Matemaatikas on protseduur suhte Δх/Δt piiri leidmiseks Δ juures. t→ 0 nimetatakse funktsiooni tuletise arvutamiseks x(t) aja järgi t ja on tähistatud kui x"(t).Kiirus on võrdne funktsiooni x( t) aja järgi t.
Harmoonilise liikumisseaduse jaoks x = x m cos(ω t+ φ 0) tuletise arvutamine annab järgmise tulemuse:
υ X =x"(t)= ω x m patt (ω t + φ 0)
Kiirendus määratakse sarnasel viisil a x kehad harmooniliste vibratsioonide ajal. Kiirendus a on võrdne funktsiooni υ( tuletisega t) aja järgi t, või funktsiooni teine tuletis x(t). Arvutused annavad:
ja x =υ x "(t) =x""(t)= -ω 2 x m cos(ω t+ φ 0) = -ω 2 x
Miinusmärk selles väljendis tähendab, et kiirendus a(t) on alati nihkemärgile vastupidise märgiga x(t) ja seetõttu on Newtoni teise seaduse kohaselt jõud, mis paneb keha teostama harmoonilisi võnkumisi, alati suunatud tasakaaluasendisse ( x = 0).
Joonisel on kujutatud harmoonilisi võnkumisi sooritava keha koordinaatide, kiiruse ja kiirenduse graafikuid.

Harmoonilise võnkumise keha koordinaatide x(t), kiiruse υ(t) ja kiirenduse a(t) graafikud.
Vedrupendel.
Vedrupendelon mingi massiga m koormus, mis on kinnitatud jäikusega k vedrule, mille teine ots on kindlalt fikseeritud.
Loomulik sagedus Vedru koormuse ω 0 vaba võnkumine leitakse järgmise valemiga:
Periood T vedru koormuse harmoonilised vibratsioonid on võrdsed

See tähendab, et vedrupendli võnkeperiood sõltub koormuse massist ja vedru jäikusest.
Võnkusüsteemi füüsikalised omadused määrata ainult võnkumiste omasagedus ω 0 ja periood T . Võnkumisprotsessi parameetrid, näiteks amplituud x m ja algfaasi φ 0 määrab viis, kuidas süsteem algsel ajahetkel tasakaalust välja viidi.
Matemaatiline pendel.
Matemaatiline pendelnimetatakse väikeseks õhukesel venimatul niidil rippuvaks kehaks, mille mass on keha massiga võrreldes tühine.
Kui pendel ripub tasakaaluasendis, tasakaalustab raskusjõudu keerme tõmbejõud N. Kui pendel kaldub tasakaaluasendist teatud nurga φ võrra kõrvale, ilmneb raskusjõu tangentsiaalne komponent. F τ = – mg sin φ. Miinusmärk selles valemis tähendab, et tangentsiaalne komponent on suunatud pendli läbipainde vastassuunas.

Matemaatiline pendel.φ – pendli nurgahälve tasakaaluasendist,
x= lφ – pendli nihe piki kaaret
Matemaatilise pendli väikeste võnkumiste omasagedust väljendatakse järgmise valemiga:
Matemaatilise pendli võnkeperiood:

See tähendab, et matemaatilise pendli võnkeperiood sõltub keerme pikkusest ja pendli paigaldamise ala vabalangemise kiirendusest.
Vabad ja sunnitud vibratsioonid.
Mehaanilised vibratsioonid, nagu mis tahes muu füüsikalise iseloomuga võnkeprotsessid, võivad olla tasuta Ja sunnitud.
vaba vibratsioon -need on võnked, mis tekivad süsteemis sisejõudude mõjul, pärast seda, kui süsteem on stabiilsest tasakaaluasendist eemaldatud.
Raskuse võnkumine vedrul või pendli võnkumine on vabavõnkumine.
Selleks, et harmoonilise seaduse järgi tekiksid vabad vibratsioonid, on vajalik, et keha tasakaaluasendisse tagasi viima kippuv jõud oleks võrdeline keha nihkega tasakaaluasendist ja suunatud nihkele vastupidises suunas.
IN tegelikud tingimused igasugune võnkesüsteem on hõõrdejõudude (takistuse) mõju all. Sel juhul muundatakse osa mehaanilisest energiast sisemine energia aatomite ja molekulide termiline liikumine ning vibratsioonid muutuvad hääbuv.
Hääbuv nimetatakse võnkudeks, mille amplituud aja jooksul väheneb.

Et võnkumised ei vaibuks, on vaja süsteemi varustada lisaenergiaga, s.t. mõjutada võnkesüsteemi perioodilise jõuga (näiteks kiigutada).
Võnkumisi, mis tekivad perioodiliselt muutuva välise jõu mõjul, nimetataksesunnitud.
Väline jõud teeb positiivset tööd ja tagab võnkesüsteemi energiavoo. See ei lase vibratsioonil hääbuda, hoolimata hõõrdejõudude mõjust.
Perioodiline välisjõud võib aja jooksul muutuda vastavalt erinevaid seadusi. Eriti huvitav on juhtum, kui väline jõud, mis varieerub vastavalt harmoonilisele seadusele sagedusega ω, mõjub võnkesüsteemile, mis on võimeline sooritama oma võnkumisi teatud sagedusel ω 0.
Kui vabavõnkumised toimuvad sagedusel ω 0, mis on määratud süsteemi parameetritega, siis püsivad sundvõnkumised toimuvad alati kell sagedus ω välisjõud .
Sundvõnkumiste amplituudi järsu suurenemise nähtust, kui loomulike võnkumiste sagedus langeb kokku välise liikumapaneva jõu sagedusega, nimetatakseresonants.
Amplituudisõltuvus x m nimetatakse sundvõnkumisi liikumapaneva jõu sagedusest ω resonantstunnus või resonantskõver.

Resonantskõverad erinevatel sumbumistasemetel:
1 – hõõrdumiseta võnkesüsteem; resonantsi korral suureneb sundvõnkumiste amplituud x m lõputult;
2, 3, 4 – erineva hõõrdumisega võnkesüsteemide tegelikud resonantskõverad.
Hõõrdumise puudumisel peaks resonantsi sundvõnkumiste amplituud suurenema piiramatult. Reaalsetes tingimustes määrab püsiseisundi sundvõnkumiste amplituudi tingimus: välisjõu töö võnkeperioodil peab olema võrdne mehaanilise energia kaoga samal ajal hõõrdumise tõttu. Mida väiksem on hõõrdumine, seda suurem on sundvõnkumiste amplituud resonantsi ajal.
Resonantsi nähtus võib põhjustada sildade, hoonete ja muude konstruktsioonide hävimist, kui nende võnkumiste omasagedused langevad kokku perioodiliselt mõjuva jõu sagedusega, mis tekib näiteks tasakaalustamata mootori pöörlemise tõttu.
10.4. Energia jäävuse seadus harmooniliste võnkumiste ajal
10.4.1. Energiasääst kl mehaanilised harmoonilised vibratsioonid
Energia jäävus matemaatilise pendli võnkumisel
Harmooniliste vibratsioonide ajal säilib süsteemi kogu mehaaniline energia (jääb konstantseks).
Matemaatilise pendli mehaaniline koguenergia
E = W k + W p ,
kus W k on kineetiline energia, W k = = mv 2 /2; W p - potentsiaalne energia, W p = mgh; m on koormuse mass; g - vabalangemise kiirendusmoodul; v - koormuskiiruse moodul; h on koormuse kõrgus tasakaaluasendist kõrgemal (joonis 10.15).
Harmooniliste võnkumiste ajal läbib matemaatiline pendel mitmeid järjestikuseid olekuid, mistõttu on soovitav arvestada matemaatilise pendli energiat kolmes asendis (vt joonis 10.15):
Riis. 10.15
1) sisse tasakaaluasend
potentsiaalne energia on null; Koguenergia langeb kokku maksimaalse kineetilise energiaga:
E = W k max ;
2) sisse hädaolukord(2) keha tõstetakse algtasemest kõrgemale maksimaalsele kõrgusele h max, seega on ka potentsiaalne energia maksimaalne:
W p max = m g h max ;
kineetiline energia on null; koguenergia ühtib maksimaalse potentsiaalse energiaga:
E = W p max ;
3) sisse vahepealne asend(3) kehal on hetkkiirus v ja see on tõstetud üle algtaseme teatud kõrgusele h, mistõttu koguenergia on summa
E = m v 2 2 + m g h ,
kus mv 2 /2 on kineetiline energia; mgh - potentsiaalne energia; m on koormuse mass; g - vabalangemise kiirendusmoodul; v - koormuskiiruse moodul; h on koormuse kõrgus tasakaaluasendist kõrgemal.
Matemaatilise pendli harmooniliste võnkumiste ajal säilib kogu mehaaniline energia:
E = konst.
Matemaatilise pendli koguenergia väärtused selle kolmes asendis kajastuvad tabelis. 10.1.
| № | positsioon | Wp | Wk | E = W p + W k |
|---|---|---|---|---|
| 1 | Tasakaal | 0 | m v max 2/2 | m v max 2/2 |
| 2 | Ekstreemne | mgh max | 0 | mgh max |
| 3 | Keskmine (hetkeline) | mgh | mv 2/2 | mv 2/2 + mgh |
Mehaanilise koguenergia väärtused on esitatud tabeli viimases veerus. 10.1, on pendli mis tahes asendi jaoks võrdsed väärtused, mis on matemaatiline avaldis:
m v max 2 2 = m g h max;
m v max 2 2 = m v 2 2 + m g h ;
m g h max = m v 2 2 + m g h ,
kus m on koormuse mass; g - vabalangemise kiirendusmoodul; v on koormuse hetkkiiruse moodul asendis 3; h - koormuse tõstmise kõrgus tasakaaluasendist kõrgemal asendis 3; v max - koormuse maksimaalse kiiruse moodul asendis 1; h max - koormuse maksimaalne tõstmise kõrgus tasakaaluasendist kõrgemal asendis 2.
Keerme läbipainde nurk matemaatiline pendel vertikaalist (joon. 10.15) määratakse avaldisega
cos α = l - hl = 1 - hl ,
kus l on niidi pikkus; h on koormuse kõrgus tasakaaluasendist kõrgemal.
Maksimaalne nurk kõrvalekalle α max määratakse koormuse maksimaalse tõstmise kõrgusega tasakaaluasendist h max kõrgemal:
cos α max = 1 − h max l .
Näide 11. Matemaatilise pendli väikeste võnkumiste periood on 0,9 s. Kui suur on maksimaalne nurk, mille juures keere kaldub vertikaalist kõrvale, kui tasakaaluasendist möödudes liigub kuul kiirusega 1,5 m/s? Süsteemis pole hõõrdumist.
Lahendus. Joonisel on kujutatud matemaatilise pendli kaks asendit:

- tasakaaluasend 1 (iseloomustab kuuli maksimaalne kiirus v max);
- äärmine asend 2 (iseloomustab kuuli maksimaalne tõstekõrgus h max tasakaaluasendist kõrgemal).
Nõutav nurk määratakse võrdsusega
cos α max = l - h max l = 1 - h max l ,
kus l on pendli keerme pikkus.
Mehaanilise koguenergia jäävuse seadusest leiame pendlipalli maksimaalse kõrguse tasakaaluasendist.
Pendli koguenergia tasakaaluasendis ja äärmises asendis määratakse järgmiste valemitega:
- tasakaaluasendis -
E 1 = m v max 2 2,
kus m on pendli kuuli mass; v max - kuuli kiiruse moodul tasakaaluasendis (maksimaalne kiirus), v max = 1,5 m/s;
- äärmuslikus asendis -
E 2 = mgh max,
kus g on gravitatsioonikiirenduse moodul; h max on palli maksimaalne kõrgus tasakaaluasendist kõrgemale.
Kogu mehaanilise energia jäävuse seadus:
m v max 2 2 = m g h max .
Avaldame siit palli tõusu maksimaalset kõrgust tasakaaluasendist kõrgemale:
h max = v max 2 2 g .
Keerme pikkuse määrame matemaatilise pendli võnkeperioodi valemist
T = 2 π l g ,
need. keerme pikkus
l = T 2 g 4 π 2 .
Asendame h max ja l soovitud nurga koosinuse avaldises:
cos α max = 1 − 2 π 2 v max 2 g 2 T 2
ja sooritage arvutus, võttes arvesse ligikaudset võrdsust π 2 = 10:
cos α max = 1 − 2 ⋅ 10 ⋅ (1,5) 2 10 2 ⋅ (0,9) 2 = 0,5 .
Sellest järeldub, et maksimaalne läbipaindenurk on 60°.
Rangelt võttes ei ole 60° nurga all kuuli võnkumised väikesed ja matemaatilise pendli võnkeperioodi standardvalemi kasutamine on ebaseaduslik.
Energia jäävus vedrupendli võnkumisel
Vedrupendli mehaaniline koguenergia koosneb kineetilisest energiast ja potentsiaalsest energiast:

E = W k + W p ,
kus W k on kineetiline energia, W k = mv 2 /2; W p - potentsiaalne energia, W p = k (Δx ) 2 /2; m on koormuse mass; v - koormuskiiruse moodul; k on vedru jäikuse (elastsuse) koefitsient; Δx - vedru deformatsioon (pinge või kokkusurumine) (joonis 10.16).
Rahvusvahelises mõõtühikute süsteemis mõõdetakse mehaanilise võnkesüsteemi energiat džaulides (1 J).
Harmooniliste võnkumiste ajal läbib vedrupendel mitmeid järjestikuseid olekuid, mistõttu on soovitatav arvestada vedrupendli energiat kolmes asendis (vt joonis 10.16):
1) sisse tasakaaluasend(1) keha kiirusel on maksimaalne väärtus v max, seega on ka kineetiline energia maksimaalne:
W k max = m v max 2 2;
vedru potentsiaalne energia on null, kuna vedru ei deformeeru; Koguenergia langeb kokku maksimaalse kineetilise energiaga:
E = W k max ;
2) sisse hädaolukord(2) vedrul on maksimaalne deformatsioon (Δx max), seega on ka potentsiaalsel energial maksimaalne väärtus:
W p max = k (Δ x max) 2 2 ;
keha kineetiline energia on null; koguenergia ühtib maksimaalse potentsiaalse energiaga:
E = W p max ;
3) sisse vahepealne asend(3) keha hetkkiirus v, vedrul on sellel hetkel mingi deformatsioon (Δx), seega on koguenergia summa
E = m v 2 2 + k (Δ x) 2 2,
kus mv 2 /2 on kineetiline energia; k (Δx) 2 /2 - potentsiaalne energia; m on koormuse mass; v - koormuskiiruse moodul; k on vedru jäikuse (elastsuse) koefitsient; Δx - vedru deformatsioon (pinge või kokkusurumine).
Kui vedrupendli koormus nihutatakse tasakaaluasendist, mõjub sellele jõu taastamine, mille projektsioon pendli liikumissuunale määratakse valemiga
F x = −kx ,
kus x on vedru pendli koormuse nihkumine tasakaaluasendist, x = ∆x, ∆x on vedru deformatsioon; k on pendelvedru jäikuse (elastsuse) koefitsient.
Vedrupendli harmooniliste võnkumiste ajal säilib kogu mehaaniline energia:
E = konst.
Vedrupendli koguenergia väärtused selle kolmes asendis kajastuvad tabelis. 10.2.
| № | positsioon | Wp | Wk | E = W p + W k |
|---|---|---|---|---|
| 1 | Tasakaal | 0 | m v max 2/2 | m v max 2/2 |
| 2 | Ekstreemne | k (Δx max) 2 /2 | 0 | k (Δx max) 2 /2 |
| 3 | Keskmine (hetkeline) | k (Δx ) 2 /2 | mv 2/2 | mv 2 /2 + k (Δx ) 2 /2 |
Tabeli viimases veerus esitatud mehaanilise koguenergia väärtustel on pendli mis tahes asendi jaoks võrdsed väärtused, mis on matemaatiline avaldis kogu mehaanilise energia jäävuse seadus:
m v max 2 2 = k (Δ x max) 2 2 ;
m v max 2 2 = m v 2 2 + k (Δ x) 2 2 ;
k (Δ x max) 2 2 = m v 2 2 + k (Δ x) 2 2,
kus m on koormuse mass; v on koormuse hetkkiiruse moodul asendis 3; Δx - vedru deformatsioon (pinge või kokkusurumine) asendis 3; v max - koormuse maksimaalse kiiruse moodul asendis 1; Δx max - vedru maksimaalne deformatsioon (pinge või kokkusurumine) asendis 2.
Näide 12. Vedrupendel teostab harmoonilisi võnkumisi. Mitu korda on tema kineetiline energia suurem potentsiaalsest energiast hetkel, kui keha nihkumine tasakaaluasendist on veerand amplituudist?
Lahendus. Võrdleme vedrupendli kahte asendit:
- äärmine asend 1 (mida iseloomustab pendli koormuse maksimaalne nihkumine tasakaaluasendist x max);
- vaheasend 2 (mida iseloomustavad tasakaaluasendist x ja kiiruse v → nihke vahepealsed väärtused).
Pendli koguenergia äärmises ja vahepealses asendis määratakse järgmiste valemitega:
- äärmuslikus asendis -
E 1 = k (Δ x max) 2 2,
kus k on vedru jäikuse (elastsuse) koefitsient; ∆x max - võnkumiste amplituud (maksimaalne nihe tasakaaluasendist), ∆x max = A;
- vahepealses asendis -
E 2 = k (Δ x) 2 2 + m v 2 2,
kus m on pendli koormuse mass; ∆x - koormuse nihkumine tasakaaluasendist, ∆x = A /4.
Vedrupendli mehaanilise koguenergia jäävuse seadus on järgmisel kujul:
k (Δ x max) 2 2 = k (Δ x) 2 2 + m v 2 2 .
Jagame kirjaliku võrdsuse mõlemad pooled k (∆x) 2 /2-ga:
(Δ x max Δ x) 2 = 1 + m v 2 2 ⋅ 2 k Δ x 2 = 1 + W k W p,
kus W k on pendli kineetiline energia vahepealses asendis, W k = mv 2 /2; W p - pendli potentsiaalne energia vahepealses asendis, W p = k (∆x ) 2 /2.
Avaldame võrrandist nõutava energiasuhte:
W k W p = (Δ x max Δ x) 2–1
ja arvutage selle väärtus:
W k W p = (A A / 4) 2 - 1 = 16 - 1 = 15 .
Näidatud ajahetkel on kineetilise ja potentsiaalne energia pendel võrdub 15-ga.